
Contenido:
- Que es una base o uframe
- ¿Porque hay que crear una base?
- Como configurar una base en fanuc
- Métodos de aprendizaje de un Uframe o base
- Que método debo usar en cada caso?
- Buenas prácticas a la hora de crear una base
- Reducir el error al coger la base
1.Que es una base?
Una base o un sistema de referencia de usuario USER FRAME es un sistema de referencia tridimensional y cartesiano sobre el cual se memorizan todas las posiciones de un de terminado programa de robot Fanuc. El TCP se mueve y reorienta en base a ese sistema siempre que movamos el robot en modo USER. Lo que generalmente llamamos base.
Si no hay definido ningún sistema de referencia usuario, por defecto, las posiciones se referirán al sistema de coordenadas WORLD.
2.¿Porque hay que crear una base?
Las bases nos sirven para varias cosas y nos ayudan mucho:
- Si estamos trabajando en una mesa de soldadura o un útil, si por lo que sea se mueve, si volvemos a crear la base recuperaríamos el trabajo.
- Si la mesa tiene una inclinación en cualquier plano o está rodada, no permitirá movernos linealmente sin problema facilitándonos el trabajo.
- Tienes que cambiar un robot, vuelves a hacer una base y revisar que has hecho bien la base y ya puedes trabajar.
- Es una buena práctica, siempre hay que hacer una base, sino las defines lo normal es que piensen que no sabes o eres un chapuzas.
La realidad es que siempre hay que crear una base o varias bases, según los útiles, mesas o espacios de trabajo que tengas.
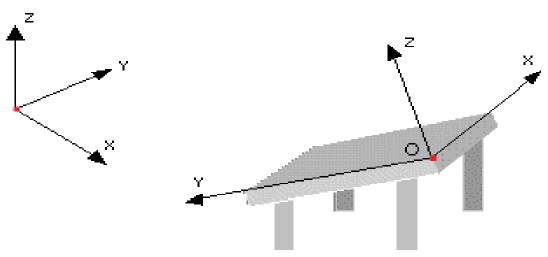
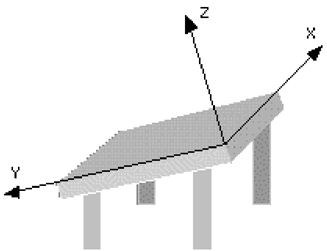
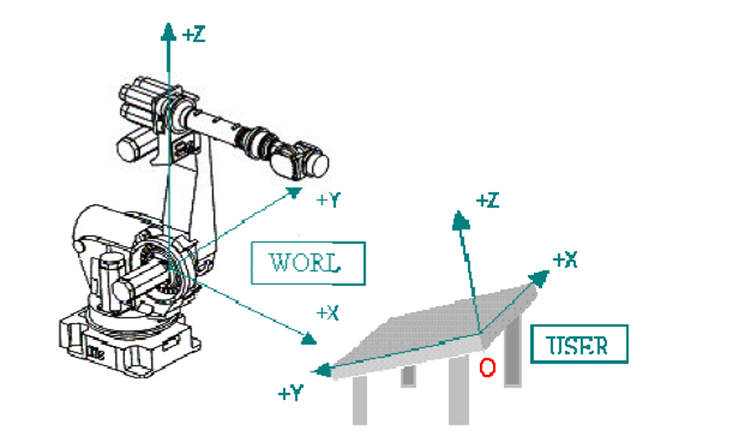
La figura que se muestra a continuación representa un sistema de referencia personalizado consiguiendo un entorno de trabajo modificado por el usuario:
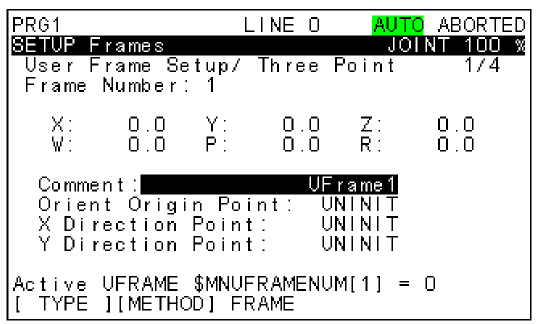
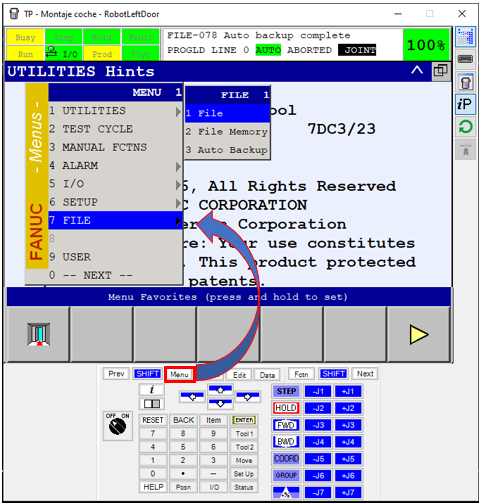
Como configurar una base en fanuc
Para poder definir un sistema de referencia usuario podemos hacerlo mediante utilizando las siguientes instrucciones:

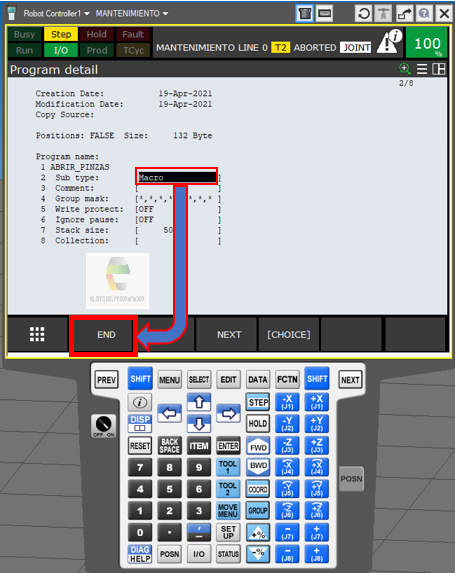
- MENU
- SETUP
- F1:TYPE
- FRAMES
- F3:OTHER
- USER
- ENTER
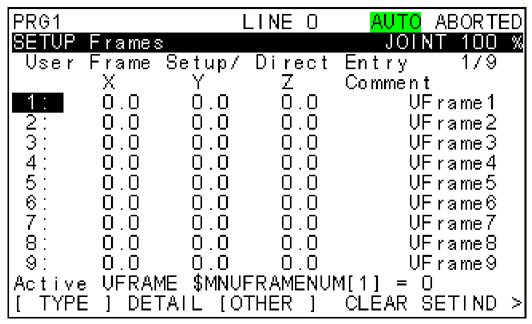
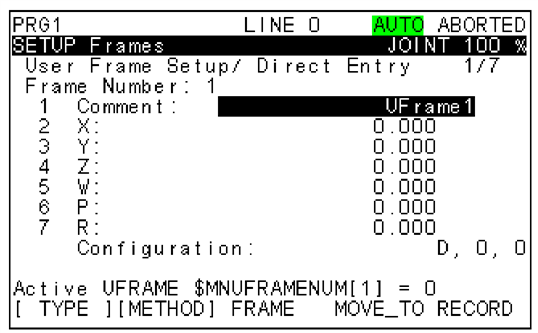
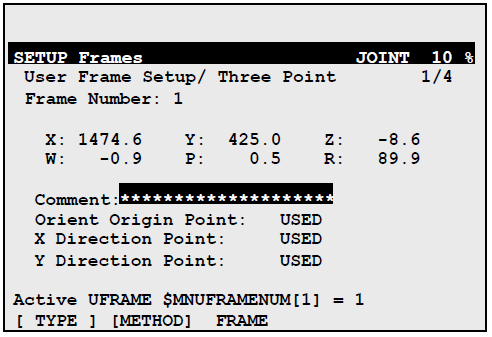
Accederemos a la pantalla anterior y podremos configurar con el cursor la herramienta determinada.
Métodos de aprendizaje de un Uframe o base:
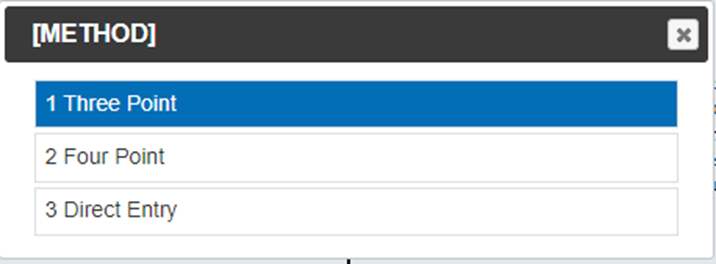
Para aprender o crear una base hay que seleccionar un metodo de aprendizaje para definir la referencia de usuario. Tenemos los siguientes métodos:
- Tres puntos
- Cuatro puntos
- Entrada directa
Método de los 3 puntos:
El origen del sistema de referencia se desplazará al sitio deseado y la posición y orientación siguiendo las tres direcciones que se definan:
3 Puntos:
Seleccionaremos en el menú:
- F2:METHOD
- THREE POINT
Con este método definiremos dos rectas que se cruzan determinan un plano, con origen fijo en el punto de cruce y Z perpendicular al plano que definimos. Es decir, definimos X y Y del plano a noventa grados y la Z es la resultante que seria en el (0,0,0).
Orient Origine Point
Memorizaremos el punto de origen para determinar la referencia personalizada por usuario. Donde esta la el sistema de referencia.
Luego en la dirección X, al final de la mesa y para finalizar la dirección Y. Los puntos pasaran de uninit a USED.
Cuando vayas a techear o aprender el ultimo veras que te calcule la base.
Tip: no es necesario aprender los puntos en orden, el que te tenga mejor.
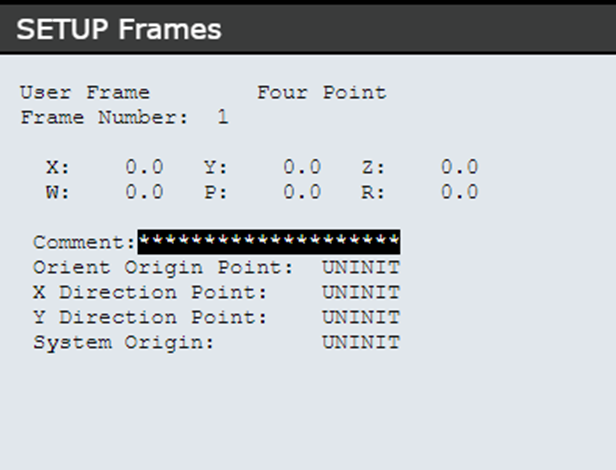
Método de los 4 puntos:
Este método es utilizado cuando el sitio deseado para la definición del sistema de referencia no está accesible o es poco cómodo.
Por ejemplo, para definir el origen de un sistema de referencia en el centro de una mesa; es máscómodo definirlo sobre los bordes y desplazar a continuación el centro.
F2: [METHOD] ® FOUR POINT
Los tres primeros pasos son idénticos a los tres primeros pasos del método de los tres puntos y el punto 4-
Paso 4:
El cuarto punto es el origen del sistema. El usuario puede definirlo allí donde crea conveniente.
El método de los cuatro puntos tienes que coger cuatro puntos, igual con un punto a mayores. Se definen los 3 puntos iguales pero con uno en diagonal con el origen. Es decir, tenemos:
- OO Origen origen
- X dirección
- Y dirección
- SO System origen
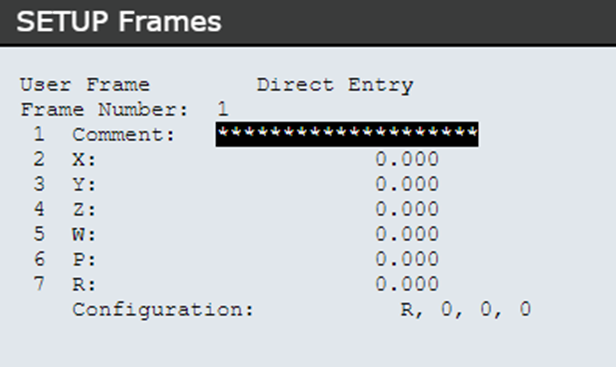
Método entrada directa:
Si te dan las distancias de la mesa puedes meterla directamente y la entrada directa es la más sencilla, pero recuerda que es complicado que aunque este medido te puedan dar las distancias reales incluyendo las orientaciones.
Que método debo usar en cada caso?
Método de los tres puntos:
Como norma general el de los tres puntos es lo ideal, es el que te recomiendo. El método de los tres puntos no lleva error, además puedes ver las rotaciones que tiene la mesa y absorberías las desviaciones de montaje en la mesa o de fabricación. Siempre que el robot este bien nivelado, lo importante es que robot este bien nivelado.
Entrada directa:
Si es una aplicación sencilla que no necesita precisión puedes usar la entrada directa, pero recuerda que no absorbes las diferencias de montaje y fabricación de la mesa. Eso quiere decir que si mueven o traslada la mesa es posible que te toque ajustar los puntos un poco.
Método de los cuatro puntos:
Este sistema tiene una ventaja que no es necesario tocar el eje de coordenadas, es decir si tocas las cuatro puntas de una mesa se define en el centro de la mesa. En algún caso te puede venir bien pero es idéntico al de tres puntos.
Una desviación de 0.1 en un metro es un milímetro aprox. Parece poco pero la realidad que en aplicaciones de mucha precisión puede ser mucho.
Como se si he realizado la base bien?
El punto de partida es ver que tiene sentido la base, tanto en distancia como en orientaciones que has definido.
Por ejemplo si tienes una mesa que esta delante del robot a un metro de distancia, las base estará a un metro en X. La z es un poco más difícil en Fanuc ya que el wold del robot esta en centro del eje 2 normalmente. , si tiene una altura de 400 y el wold del robot a 200 milímetros estará a 200 en Z.
En el caso de las rotaciones si lo defines como wold las rotaciones deberían ser 0 en todas las direcciones. En cambio, si la defines con la Z hacia abajo la rotación de Z tiene que ser 180 o -180 que viene a ser lo mismo.
Si te pones en la base que has definido y te mueves en una de las coordenadas, si el tcp no se mueve totalmente en paralelo no está bien techada o palpada como quieras llamarlo.
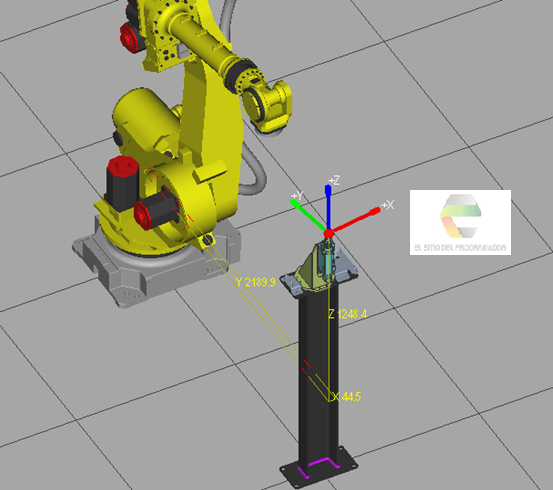
Ejercicio de verificación
Ves la base que hay en la imagen, esto para todos los robots es igual, que ángulo tendrá y a que distancias estará la imagen? En la imagen puedes ver que el wold no está en la base del robot como KUKA o ABB.
La esquina superior de la mesa esta a 1475 mm, 425 mm en Y, Z 400 mm. El eje 2 está a 400 mm y las rotaciones tal y como las ves. La coordenada Y en dirección al robot.
Pues como la Y mira hacia el robot la rotación de la base tiene que ser noventa grados, y como es horaria noventa grados positivos.
La base quedaría de la siguiente manera:
La dispersión que ves en Z puede ser el suelo que no este bien nivelado o la dispersión entre el montaje y la fabricación. La diferencia en las rotaciones lo mismo, son pequeñas y asumibles lo pero la Z es bastante aunque si el robot esta bien nivelado y la mesa también que el suelo este más bajo no sería un problema.
Buenas prácticas a la hora de crear una base
- Hacer una rutina en la cogida de los puntos, en base cero y con la tool que midas la base o frame.
- Si la mesa está a 45 grados definirá con esos 45 grados te ayudara a moverte en lineal, es muy práctico. Puedes hacer dos bases una auxiliar para moverte.
- Recuerda coger los ejes como te interesen, cuando se define una base hay que pensar en cómo quieres la base.
- Coger orientaciones parecidas al world, siempre que no haya un estándar que lo contradiga.
Reducir el error al coger la base
Si Mantienes la misma orientación los puntos para aprender la base, es decir solo te mueves en coordenadas X, Y y Z. Si lo haces así reducirás el error, cuanto lo reducirás pues justamente el error que tengas en el TCP junto con lo que lo rotes, cuanto más rotes más error. Sino reorientas no acumulas el error del TCP.
Si te ha gustado y quieres invitarme a un café con paypal.
Posts Relacionados con este:
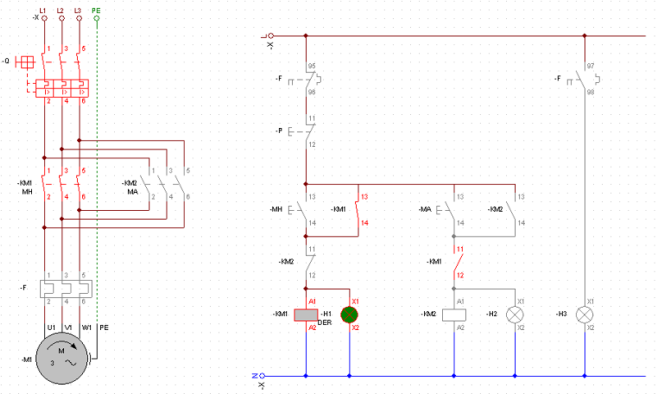
inversor de giro motor trifásico
Que es un ciclo de SCAN PLC siemens
añadir un GSD a un proyecto step7
Si dejas un comentario sobre lo que te ha parecido el post, me ayudaras a mejorar y nos servirá a todos. Si te parece bueno o malo, si ves que falta algo o se puede mejorar. Sera un WIN/WIN. Muchas gracias
Desarrollado y publicado por www.elsitiodelprogramador.wordpress.com con Licencia Creative Commons 4.0


Un comentario sobre “Sistema de referencia o base en Fanuc”